¿Qué es un GPS NEO-6?
Los dispositivos NEO-6 son una familia de receptores fabricados por U-Blox, que pueden ser conectados con facilidad a un autómata o procesador como Arduino.
Los GPS NEO-6 disponen de interface de comunicación UART, SPI, DDC (I2C) y USB. Soportan los protocolos NMEA, UBX binary y RTCM.
La familia de receptores GPS NEO-6 están diseñados para tener un pequeño tamaño, pequeño coste, y pequeño consumo. La intensidad de corriente necesaria es de unos 37mA en modo de medición continuo.
La tensión de alimentación es de 2.7 a 3.6V para los modelos NEO-6Q/6M, y 1.75-2.0V para los modelos NEO-6G.
Frecuentemente se encuentran integrados en módulos que incorporan la electrónica necesaria para conectarla de forma sencilla a un Arduino. En la mayoría de los módulos, esto incluye un regulador de voltaje que permite alimentar directamente a 5V.
El GPS NEO-6 tiene un tiempo de encendido cold y warm de unos 30s, y en hot 1 segundo. La frecuencia máxima de medición es de 5Hz.
La precisión que en posición es de 2.5m, en velocidad 0,1m/s y en orientación 0.5º, valores más que aceptables para un sistema de posicionamiento GPS.
Los GPS son muy empleados en proyectos de electrónica y Arduino, especialmente en el caso de robots y vehículos como cuadricópteros.
Precio
Los receptores de GPS Neo-6 están diseñados para ser dispositivos de bajo precio. Podemos encontrar módulos como el NEO6MV2 por unos 3.60€, en vendedores internacionales de AliExpress o eBay.
Esquema de montaje
La conexión es sencilla, ya que vamos la UART disponible en el receptor de GPS. En primer lugar alimentamos el módulo conectando Vcc y Gnd del módulo, a 5V y Gnd de Arduino.
Para que la conexión no interfiera con el puerto serie normal vamos a usar la librería SoftSerial para establecer una comunicación empleando cualquiera de los pines.
En el ejemplo usaremos el Pin 3 para RX y el Pin 4 para TX. Recordar que en la comunicación serial los pines se conectan con sus opuestos, es decir, RX - TX y viceversa, por lo que el esquema es el siguiente.
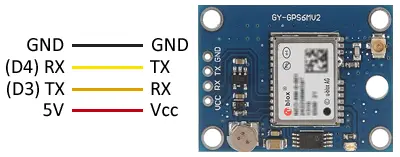
Mientras que la conexión con el módulo, vista desde Arduino, quedaría de la siguiente forma.
Ejemplos de código
Obtener lectura NMEA
El código necesario es igualmente muy sencillo, al realizarse a través de puerto se serie. Empleamos la librería SoftSerial para crear un puerto en cualquier par de pines de Arduino.
#include <SoftwareSerial.h>
const int RX = 4;
const int TX = 3;
SoftwareSerial gps(RX, TX);
void setup()
{
Serial.begin(115200);
gps.begin(9600);
}
void loop()
{
if (gps.available())
{
char data;
data = gps.read();
Serial.print(data);
}
}Los datos obtenidos del NEO-6 están en formato $GPRMC, uno de las secuencias disponisbles en el protocolo NMEA (National Marine Electronics Asociation).
Esta secuencia tiene la forma
$GPRMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,ddmmyy,x.x,a\*hhSiendo,
| hhmmss.ss | Hora UTC |
| A | Estado receptor (A = OK, V = warning) |
| llll.ll,a | Latitud (a = N o S) |
| yyyy.yy,a | Longitud (a = E o W) |
| x.x | Velocidad en nudos in knots |
| x.x | Curso en grados |
| ddmmyy | Fecha UT |
| x.x,a | Variacion magnética en grados (a = E o W) |
| *hh | Checksum |
Por ejemplo, la secuencia
$GPRMC,225446,A,4916.45,N,12311.12,W,000.5,054.7,191194,020.3,E\*68Tiene el siguiente significado
| 225446 | Hora 22:54:46 UTC |
| A | Estado receptor A = OK |
| 4916.45,N | Latitud 49º 16.45 min Norte |
| 12311.12,W | Longitud 123º11.12 min Oeste |
| 000.5 | Velocidad 0.5 nudos |
| 054.7 | Curso 54.7º |
| 191194 | Fecha 19 Noviembre 1994 |
| 020.3,E | Variación magnética 20.3º East |
| *68 | Checksum |
Obtener coordenadas con TinyGPS
Para interpretar la secuencia $GPRMC de forma sencilla disponemos de la librería TinyGPS, que nos permite parsear los datos obtenidos del módulo GPS.
El siguiente ejemplo emplea la librería TinyGPS para obtener las coordenadas (latitud y longitud) y mostrarlas en la pantalla.
#include <SoftwareSerial.h>
#include <TinyGPS.h>
TinyGPS gps;
SoftwareSerial softSerial(4, 3);
void setup()
{
Serial.begin(115200);
softSerial.begin(9600);
}
void loop()
{
bool newData = false;
unsigned long chars;
unsigned short sentences, failed;
// Intentar recibir secuencia durante un segundo
for (unsigned long start = millis(); millis() - start < 1000;)
{
while (softSerial.available())
{
char c = softSerial.read();
if (gps.encode(c)) // Nueva secuencia recibida
newData = true;
}
}
if (newData)
{
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
Serial.print("LAT=");
Serial.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6);
Serial.print(" LON=");
Serial.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6);
Serial.print(" SAT=");
Serial.print(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites());
Serial.print(" PREC=");
Serial.print(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop());
}
gps.stats(&chars, &sentences, &failed);
Serial.print(" CHARS=");
Serial.print(chars);
Serial.print(" SENTENCES=");
Serial.print(sentences);
Serial.print(" CSUM ERR=");
Serial.println(failed);
}Descarga el código
Todo el código de esta entrada está disponible para su descarga en Github. 