Continuamos con la serie de entradas destinada a construir un coche robot 2WD controlado por un procesador como Arduino.
En la entrada anterior vimos el presupuesto y que podíamos construir un robot totalmente funcional por entre 20-25€, en función de los accesorios que queramos poner.
En esta entrada vamos a ver el montaje de nuestro coche robot 2WD. En la siguiente entrada de esta serie veremos el esquema eléctrico y en la última entrada veremos algunos ejemplos de código.
Configuración del robot 2WD
En la entrada anterior vimos que existían varias disposiciones que podíamos montar en nuestro robot 2WD. Básicamente todas consisten en un chasis de 2 motores y 2 ruedas + una loca, junto con un controlador de motores, y un procesador como Arduino.
La diferencia será (aparte de usar otro chasis) el procesador que usemos, el controlador de motores y los sensores o controles que queramos añadir.
Así, recordamos que teníamos la opción de poner encoders para controlar la velocidad y posición, que era prácticamente imprescindible si queríamos controlar nuestro robot 2WD correctamente.
En cuanto a sensores de distancias, podíamos poner sensores de ultrasonidos, infrarrojos, laser. También variaba el número de sensores, o si preferíamos poner un único sensor unido a un servo para que pueda girar.
Y otra mejora era poner dos o más detectores de líneas, o una barra de detección con varios sensores, para hacer un robot seguidor de líneas.
En esta entrada la configuración que vamos a ver es Arduino Nano, controlador motores L298N, encoders, y un sensor de ultrasonidos HC-SR04 mirando al frente. Esta es una de las configuraciones más sencillas y más habituales en robots “caseros”.
Es decir, de la siguiente imagen, vamos a montar el robot de la derecha (que en la imagen sale a medio montar mientras le hacía las fotos, por eso veréis que ciertas partes no están “rectas”).
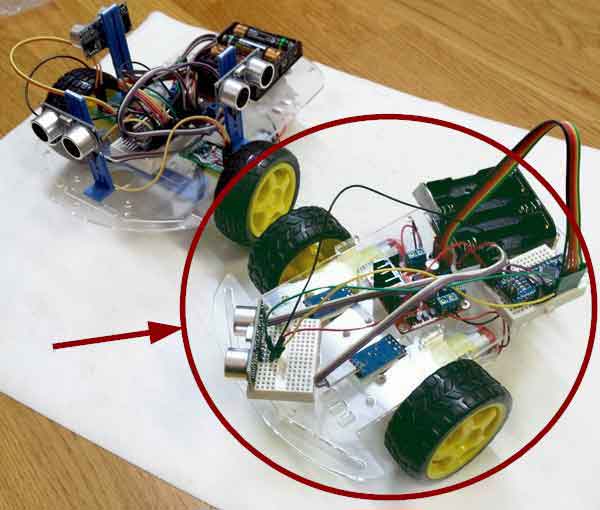
En cualquier caso, hacer pequeñas modificaciones como añadir más sensores de distancia, o un servo para girar un sensor, o añadir la detección de líneas, es muy sencillo y no tiene ninguna dificultad.
Por tanto, sentiros libres de experimentar y hacer las modificaciones que consideréis oportuno. ¡Para eso estamos, para jugar y probar!
Montaje del Robot 2WD
Comenzamos soldando los cables a los motores. Usaremos cables negro y rojo, por tener un criterio, aunque aquí no es algo crítico porque en realidad aún no sabemos el sentido de giro del motor. Lo podemos cambiar después en el L298N, o incluso en código.
Lo que sí es importante es que, tomemos el criterio que tomemos, usemos el mismo en ambos motores.
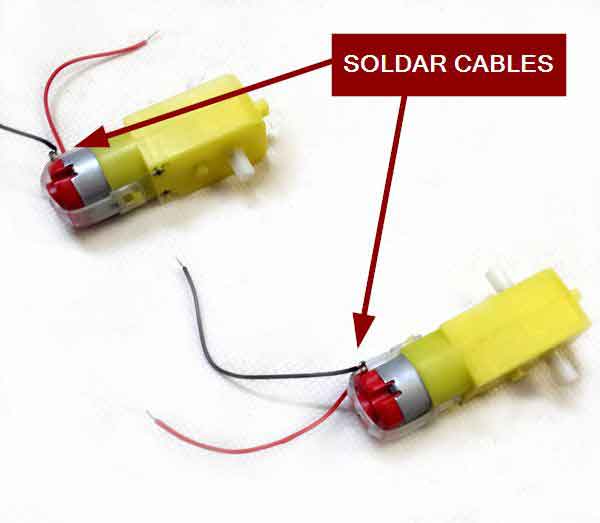
Un soldador de estaño es una máquina que puede quemar y ser peligrosa. Usarla con cuidado, y siempre en presencia de un adulto.
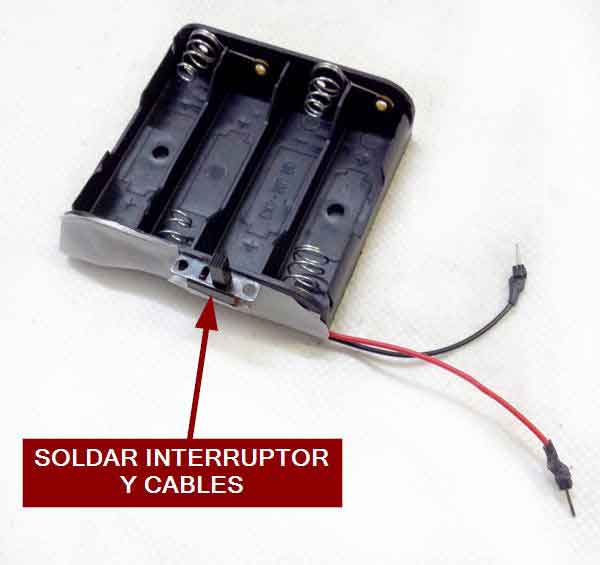
A continuación añadimos el interruptor a portabaterías. Tendréis que soldar los cables al interruptor que tengáis, que puede ser como el que enseño yo o cualquier otro.
En mi caso, lo pego el interruptor al propio portabaterías, y tapo/protejo los cables con un trocito de cinta aislante. También podéis poner el interruptor en el chasis y llevar hasta ahí los cables. A mí me gusta pegarlo en el propio portabaterías, así queda un único módulo compacto, más fácil de montar.
Aquí sí que es importante que tengáis un criterio de colores en los cables, usando cable rojo para el positivo, y cable negro para el negativo.
En el resto del montaje no vamos a necesitar más el soldador.
Nos pasamos al chasis. En mi caso, la base es de metacrilato, pero, en función del vendedor, también puede ser de plástico negro, madera, o incluso chapa.
Añadimos la rueda loca empleando los separadores de latón, tornillos, y tuercas.

Los que tengáis bases de plástico, sobre todo de metacrilato, cuidado al hacer fuerza sobre la base y al atornillas porque es frágil y puede partirse.
A continuación, atornillamos los motores empleando las piezas en “T”. Metemos las piezas en las ranuras de la base, metemos el motor en medio, y usamos tornillos para pasar de lado a lado y poner una rosca.
Es importante que los motores queden en el mismo sentido. La tendencia es ponerlos simétricos (con los cables de ambos motores hacia dentro o hacia afuera) pero es mejor ponerlos en el mismo sentido, porque así al avanzar o retroceder el motor, ambos motores giran en el mismo sentido.
Los motores no funcionan exactamente igual girando en un sentido que en otro y ponerlos de esta forma hará que después sea más sencillo que el motor avance recto.

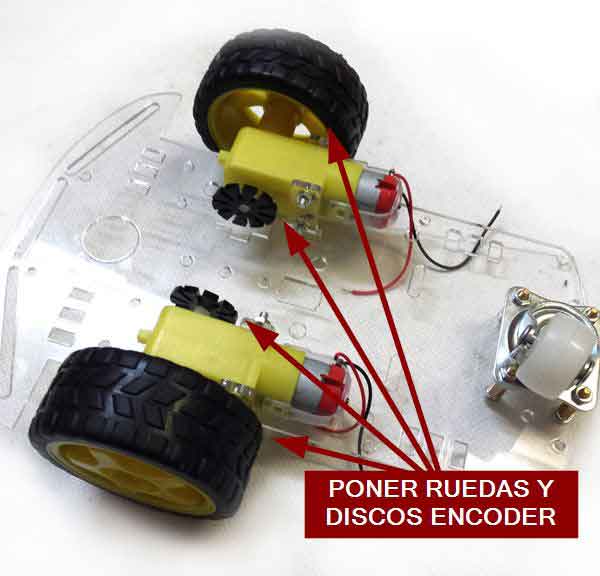
Ahora acoplamos las ruedas y los discos ranurados de los encoders en el eje. Apretamos con cuidado y nos aseguramos de que ninguna parte roce con nada (ni siquiera el fin de la rueda con el cuerpo del motor).
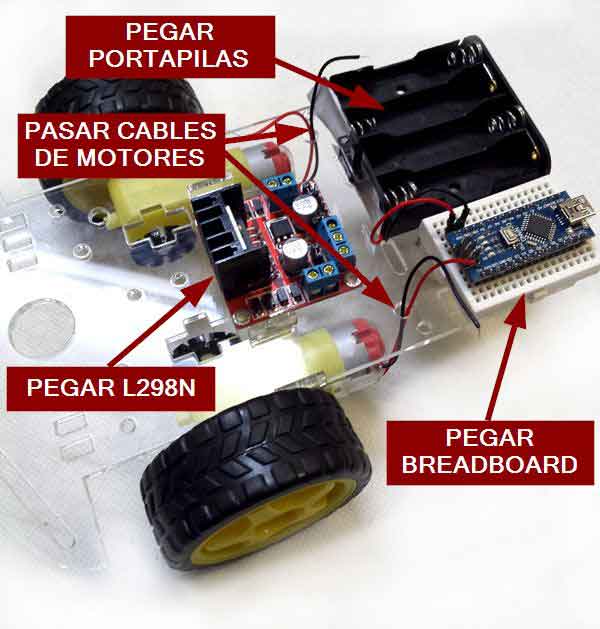
Le damos la vuelta al robot, poniendo las ruedas al suelo, pasamos los cables de los motores por los agujeros del chasis y conectamos los cables de alimentación a la breadboard.
También posicionamos los elementos como pone vemos en la siguiente imagen. Tenemos el portabaterias, una mini breadboard con un Arduino Nano, y el controlador de motores L298N.
Cuando estemos a gusto con la disposición y estemos seguros de que no interfieren entre ellos ni con las ranuras del chasis, procedemos a fijarlos a la base.
La breadboard tiene su propio pegamento, únicamente tenemos que retirar el papel protector y pegarlo a la base. Para el portabaterias, y el L29N, un par de tiras de cinta de doble cara en cada uno será suficiente.
Al pegar los componentes, sujetar la base por debajo con la mano para evitar hacer fuerza y partirla.
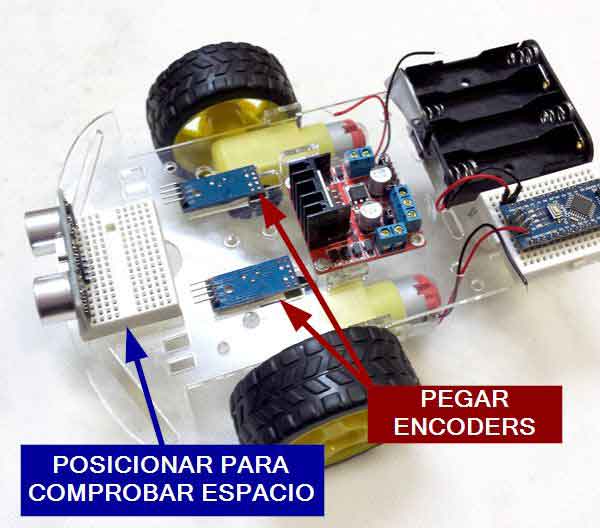
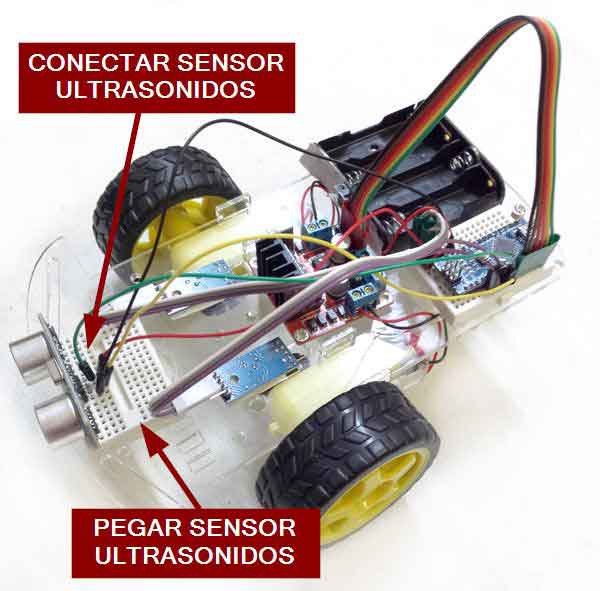
Pasamos a poner los encoders. Presentamos la placa breadboard con el sensor de ultrasonidos para asegurarnos de que cabe todo correctamente.
Introducimos la “U” del sensor en la ranura del chasis, dejando el disco ranurado en medio. Si el disco roza con el sensor podemos moverlo desplazarlo en el eje para asegurar que gira correctamente.
Finalmente, fijamos los encoders a la base del robot empleando una tira de cinta de doble cara en cada sensor.
Conectamos los encoders y el L298N a la breadboard de Arduino.
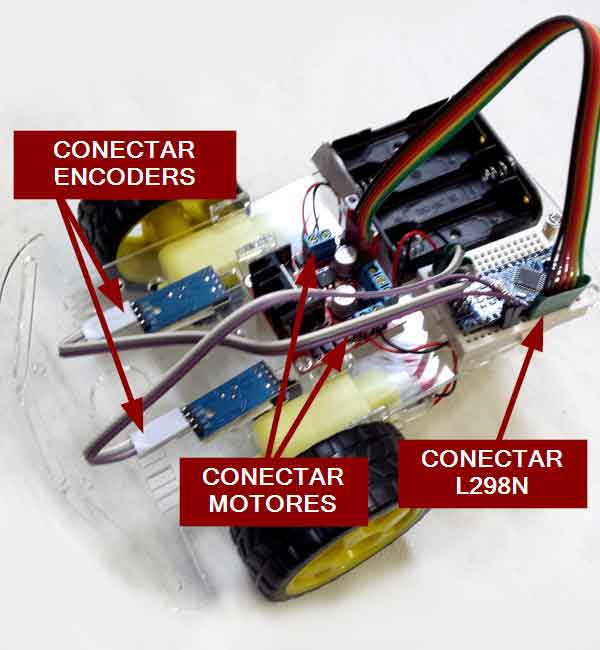
No os preocupéis ahora por las conexiones, ya que la veremos de forma intensiva en la siguiente entrada.
Volvemos a poner el sensor de ultrasonidos en sitio y lo pegamos de forma definitiva con el pegamento de la breadboard, tras retirar el papel protector.
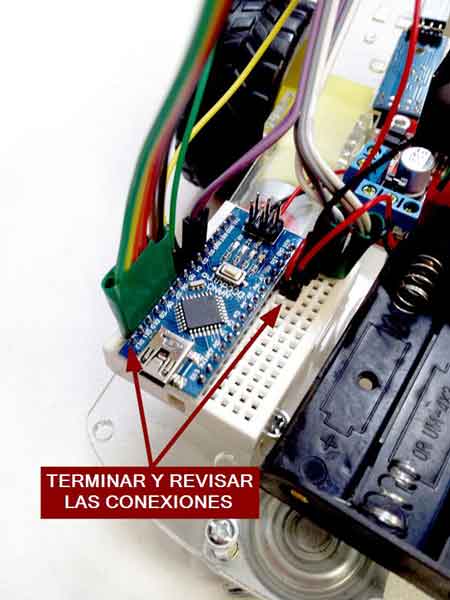
Por último, terminamos de realizar todas las conexiones y revisamos que todo sea correcto antes de añadir las pilas.
Las conexiones quedarán más o menos como en la siguiente imagen, aunque no preocupéis ahora mismo de mirar las conexiones porque, como digo, lo vamos a ver en la siguiente entrada (y además seguramente cambiaré algún cable para que sea más sencillo de montar).
¡Ya hemos terminado el montaje de nuestro robot 2WD! Si quisiéramos montar un servo en el sensor HC-SR04 delantero, simplemente quitaríamos la breadboard frontal y pondríamos un servo.
Si queremos añadir sensores de detección de líneas, los pegaríamos en la parte inferior del sensor acercándolos lo más posible al suelo, pero a manteniendo una distancia de unos milímetros para que el robot no “choque” con cualquier irregularidad o resalto del terreno.
De forma similar, si queremos usar cualquier otro tipo de sensor, o controlador de motores, o procesador, o si queremos añadir más sensores, o un módulo de bluetooth. Es cuestión de echarle inventiva, posicionar las cosas bien, y fijarlas lo mejor posible.
Pero vamos, con un poco de pegamento, cinta de doble cara, y alguna pieza de plástico que recicléis de algo que vayáis a tirar, no vais a tener ningún problema para hacer distintas configuraciones e inventos. ¡Y es lo más divertido!
Hasta aquí esta entrada sobre el montaje de nuestro primer robot 2WD. En la próxima veremos el esquema de conexión (y algunas posibles variaciones) y en la última algunos ejemplos de código.
Consulta el resto de artículos de la serie Robot Car.
Descarga el código
Todo el código de esta entrada está disponible para su descarga en Github. 