¿Qué es una bomba de agua?
Una bomba de agua es un máquina hidráulica que permite incrementar la energía cinética de un caudal de agua.
Las bombas hidráulicas son elementos ampliamente conocidos y empleados en la industria desde antaño, y constituyen toda una rama de la técnica. Existe una gran variedad de bombas, que abarcan un amplio rango de potencias y características hidráulicas.
Independientemente de sus características o potencia, siempre podemos controlar un equipo de bombeo mediante un procesador, siendo de hecho frecuente que estén controlados por un autómata. Arduino, por supuesto, no es una excepción, y podemos encender cualquier tipo de bomba de agua mediante las salidas digitales y el uso de un MOSFET o una salida por relé.
Las bombas hidráulicas son componentes fundamentales en instalaciones e infraestructuras, en sistemas de abastecimiento y depuración de agua y sistemas de climatización. Industrialmente, forman parte de un sin fin de equipamientos e impulsan todo tipo de fluidos.
En nuestros proyectos de electrónica podemos, por ejemplo, emplear una bomba de agua junto a un sensor de humedad del suelo o un reloj de tiempo real para montar un sistema de riego automático, combinarlos con un sensor de lluvia para montar una pequeña bomba de achique, o medir el nivel de un depósito con un sensor de ultrasonidos para mantenerlo constante.
Precio
Industrialmente, existen bombas de todo tipo de rango de precios. En el campo doméstico, encontramos bombas sumergibles de pequeña potencia, como las que se usan en acuarios o fuentes, por unos 3€, en vendedores internacionales en eBay o AliExpress.

¿Cómo funciona una bomba de agua?
Una bomba de agua consta de un accionamiento, en la mayoría de los casos un motor eléctrico, acoplado a un elemento rotativo denominado rodete.
El rodete está formado por álabes que, al girar, transmiten parte de la energía al fluido que lo atraviesa. Normalmente los álabes están curvados formando una guía para las partículas, y su forma determina la cantidad de energía que se transmite al fluido y el grado en que esta se reparte entre velocidad o presión.
Sin embargo, en algunas bombas de muy pequeña potencia los álabes son rectos, formando un simple aspa.
En las bombas axiales, el agua entra en la bomba por el centro del rodete, incrementa su energía a medida que lo atraviesa girando con el mismo, y finalmente abandona la bomba en sentido tangencial.
Existen bombas que emplean otro tipo de fluidos, en lugar de agua. Por ejemplo, existen bombas para mover hidrocarburos, aceites, o disoluciones. Sin embargo, aunque la teoría dice que cualquier máquina hidráulica puede funcionar al cambiar el fluido que impulsa, en el mundo real deberemos comprobar en las especificaciones que la bomba está preparada para el tipo de fluido que vamos a emplear.

También podemos clasificar las bombas entre sumergibles y bombas no sumergibles.
Las bombas sumergibles el motor se encuentra sellado en un encapsulado, por lo que toda la bomba se introduce en el fluido, lo que evita tener una tubería de aspiración.
En las bombas no sumergibles el motor no está impermeabilizado, por lo que no puede ser introducido dentro del fluido. Por tanto, necesitan una tubería de admisión, que debe cumplir unas determinadas de condiciones para que la bomba funcione correctamente (diferencia de altura con la cota del fluido, mecanismo de cebado, diámetro de la tubería de admisión…)
En general es más sencillo manejar las bombas sumergibles por lo que, salvo que estéis seguros de lo que hacéis, seleccionar bombas sumergibles siempre que sea posible.
Prestar atención al tipo de bomba que empleéis, y nunca introduzcáis en el fluido una bomba no sumergible. Dañaréis la bomba, y podéis causar un cortocircuito.
Esquema de montaje
El esquema de montaje es sencillo, simplemente vamos a usar un MOSFET como el IRF520N como interruptor para controlar el encendido de la bomba.
Por un lado, alimentamos el módulo con la tensión nominal de la bomba, mediante GND y Vin.
Por otro lado, conectamos la carga mediante la clema de conexión. Una bomba, salvo que esté internamente compensada, es una carga inductiva. Por tanto, deberemos añadir un diodo de protección flyback, como vimos en la entrada sobre MOSFET.
Finalmente, alimentamos la electrónica del módulo conectando Vcc y GND a 5V y GND en Arduino, y conectamos el Pin SIG a cualquiera de las salidas digitales de Arduino.
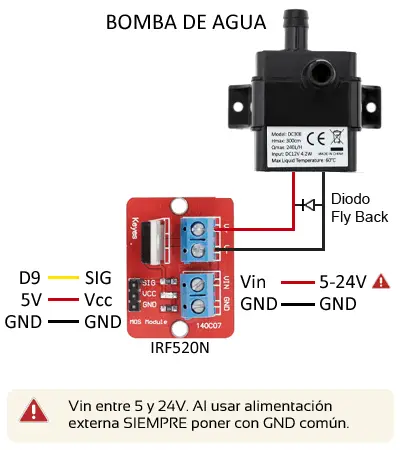
La conexión, vista desde Arduino, sería la siguiente.
Debemos tener en cuenta la tensión de alimentación y la corriente nominal de la bomba de agua. En caso de consumir más de 1A, deberemos añadir un disipador de calor al IRF520N, o usar otro modelo de MOSFET o incluso una salida por relé.
Ejemplos de código
El código necesario es sencillo, ya que para a controlar la bomba de agua únicamente necesitamos emplear una salida digital, tal y como vimos en la entrada salidas digitales.
Por ejemplo, el siguiente código simplemente encendería y apagaría la bomba de agua cada 10 segundos.
const int pin = 9;
void setup()
{
pinMode(pin, OUTPUT); //definir pin como salida
}
void loop()
{
digitalWrite(pin, HIGH); // poner el Pin en HIGH
delay(10000); // esperar 10 segundos
digitalWrite(pin, LOW); // poner el Pin en LOW
delay(10000); // esperar 10 segundos
}Descarga el código
Todo el código de esta entrada está disponible para su descarga en Github. 